پروژه متلب فیلتر کالمن برای جسم در حال سقوط
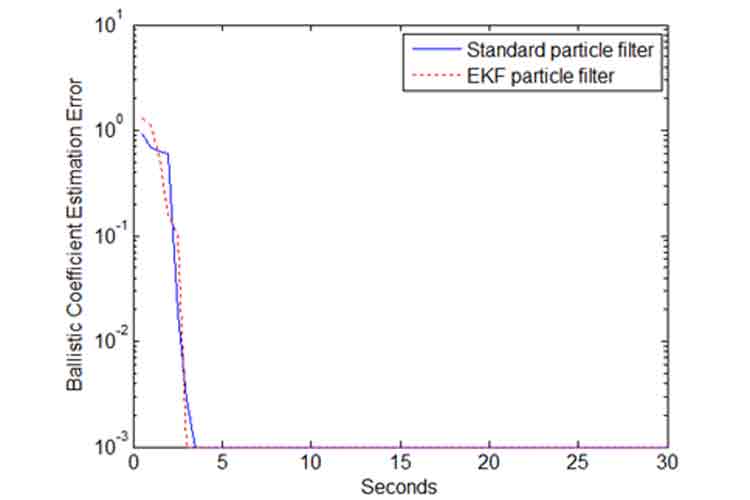
در این تحقیق و برنامه متلب (matlab) به مطالعه روشی برای تخمین وضعیت یک جسم در حال سقوط با استفاده از فیلتر کالمن گسترش یافته (EKF) و مقایسه آن با فیلتر ذرهای میپردازیم. همچنین روش مورد نظر را در متلب برنامه نویسی شده است.
تئوری تخمین وضیعت یکی از بهترین روشهای ریاضی برای تجزیه و تحلیل مدلها در حالتهای مختلف یک سیستم یا یک فرایند است. حالت سیستم توسط مجموعهای از متغیرها که نشان دهندهی توضیح کامل شرایط داخلی در هر لحظه از زمان میباشد، تعریف میشود. فیلتر کردن روند تصادفی به یک روش تخمین گفته میشود و به وسیلهی روشهای آماری به خوبی مشخص میشود. روش خطی و غیر خطی، دو نوع روند تخمین حالت میباشد. روش خطی تخمین یک سیستم به سادگی با استفاده از فیلتر کالمن تحلیل میشود. همچنین برای محاسبهی پارامترهای موقعیت هدف با اطلاعات اولیه در شرایط محیط نویزی، مورد استفاده قرار میگیرد. اما فیلتر کالمن مرسوم تنها برای مدلهای خطی بهینه میباشد و این روش وقتی خوب عمل میکند که مدل سیستم و شاخصهای آماری نویز به خوبی مشخص باشد. اکثر مسئلههای تخمین موقعیت غیر خطی هستند بنابراین فیلتر کالمن استفاده عملی محدودی دارد.
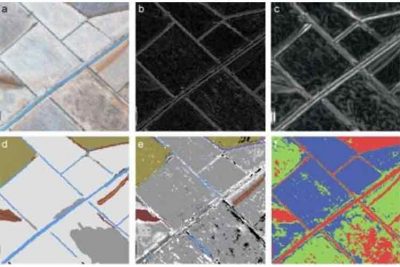
فیلتر کالمن بهبود یافته به اسم EKF و فیلتر ذرهای به عنوان فیلتر شناخته شده در تخمینهای غیر خطی هستند. فیلتر کالمن گسترش یافته یک فیلتر غیر خطی از فیلتر کالمن است که در محدودهی آخرین میانگین و کوواریانس خطی شده است. تخمین میتواند با استفاده از مشتق جزی در اطراف آخرین تخمین برای محاسبهی اجزای تخمین در حالت غیر خطی، خطی شود. EKF به صورت استاندارد در تئوری تخمین موقعیت غیر خطی در نظر گرفته میشود. در این تحقیق به بررسی یک مثال برای تخمین موقعیت یک پرتابه در هوای آزاد به سمت زمین میپردازیم.
قوانین ثبت دیدگاه